
2910's 2023 Dead Axle Pivot
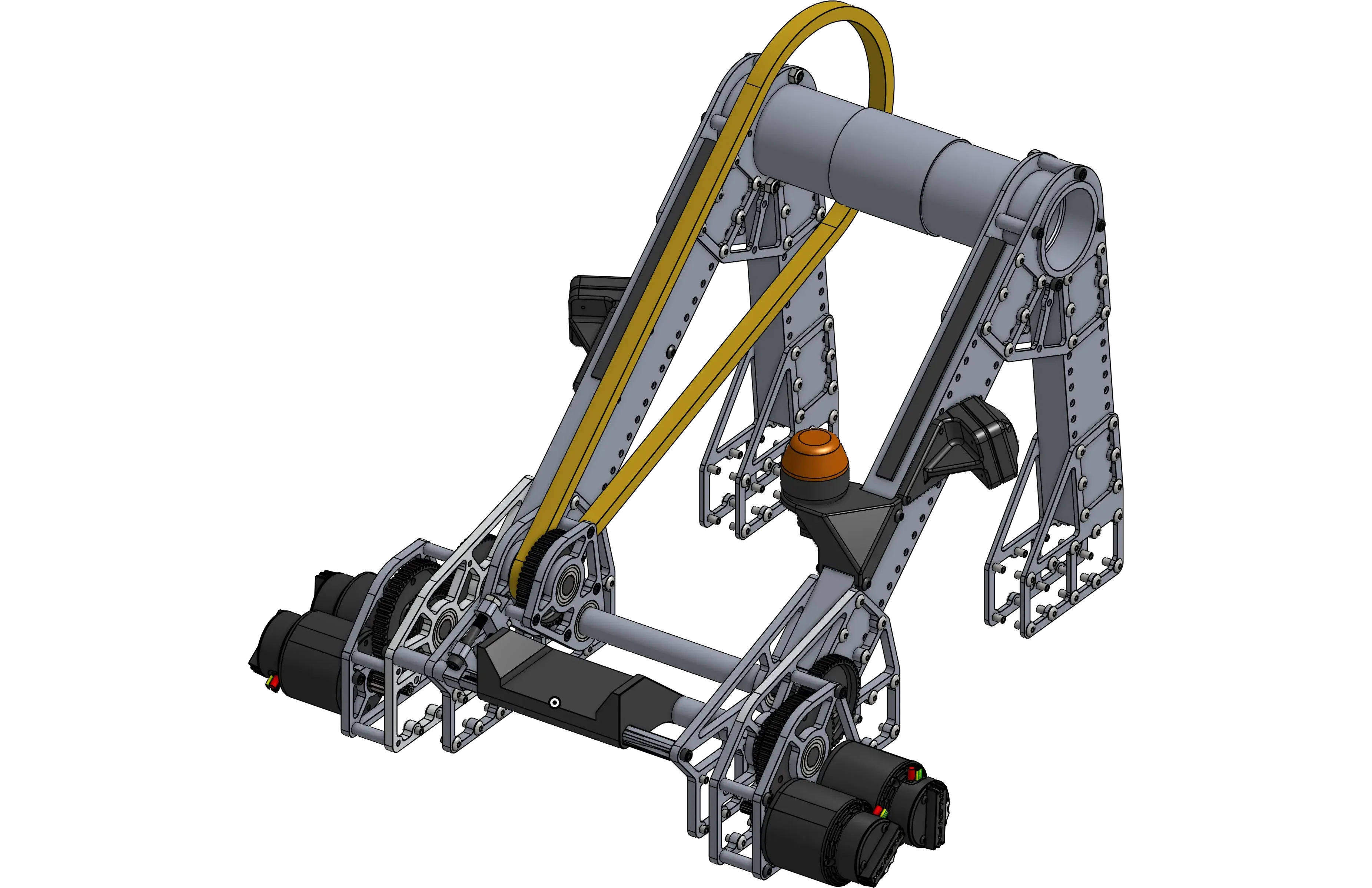 A custom dead-axle pivot with a creative chain tensioning solution.
A custom dead-axle pivot with a creative chain tensioning solution.(Thanks to JB of FRC6995 for cleaning the OnShape document up!)
Behind the Design
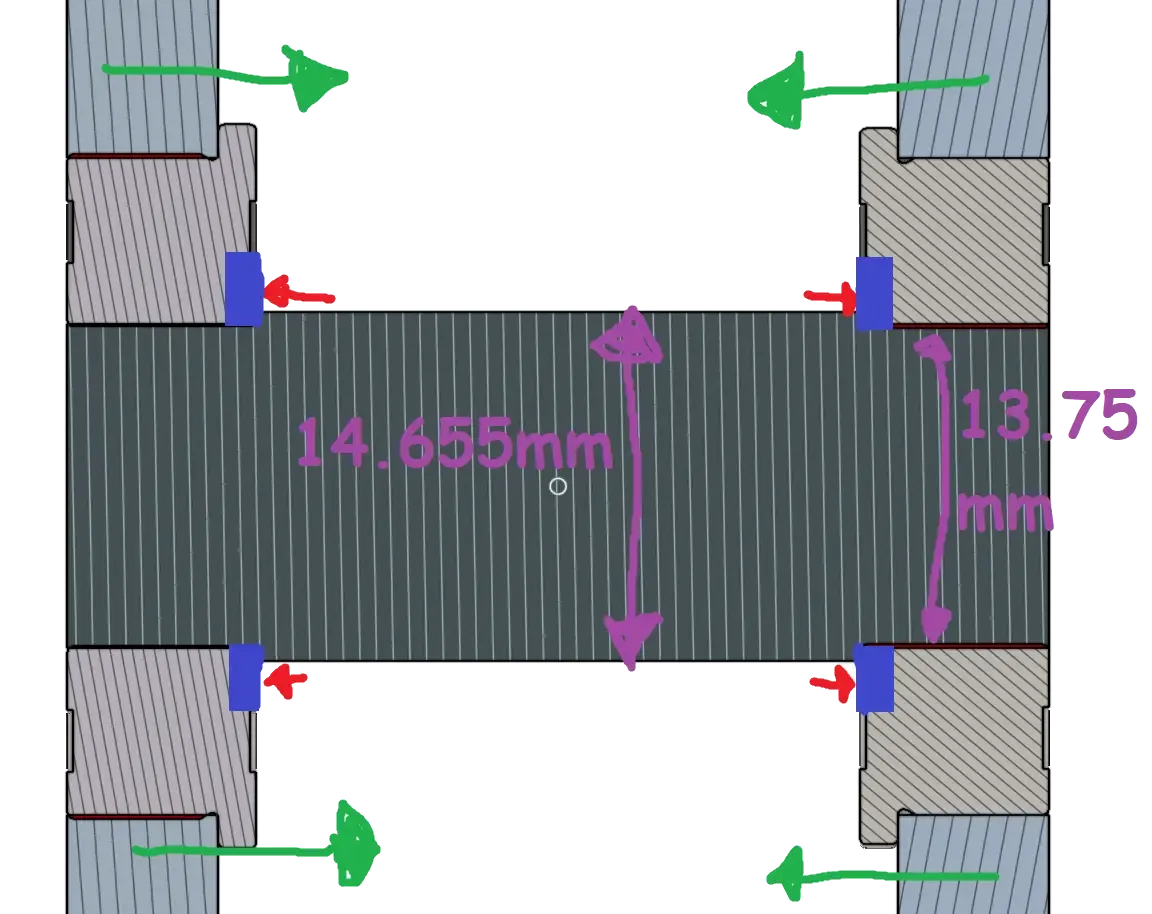
Section titled “Behind the Design”The pivot is driven by 2 mirrored dual falcon 500 gearboxes. These gearboxes are incredibly compact and thoughtful design decisions have been made throughout the whole pivot to reduce part count. One method utilized in this gearbox is to use a Thunderhex bearing retention technique in which each shaft is turned down from 1/2” Hex to 13.75mm (Thunderhex diameter) on each end, which fully constrains each flange bearing as long as the two plates are compressed.
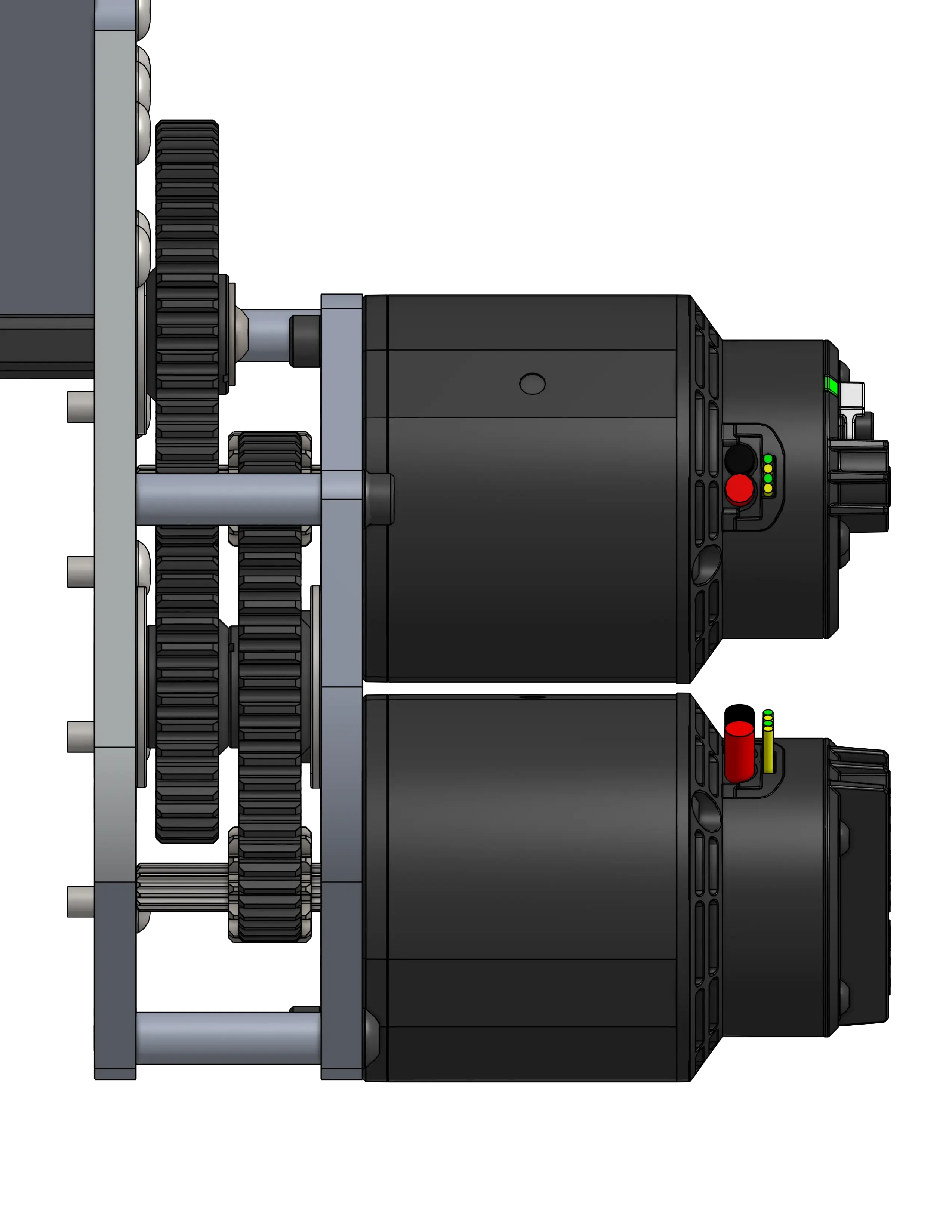
All of these plates are heavily lightened to increase the robots top speed and acceleration capabilities (F=ma), and to keep the center of gravity low. The gearboxes and even motor placement on the gearboxes are as low and central as possible to improve the robots center of mass.
Mechanical Link
Section titled “Mechanical Link”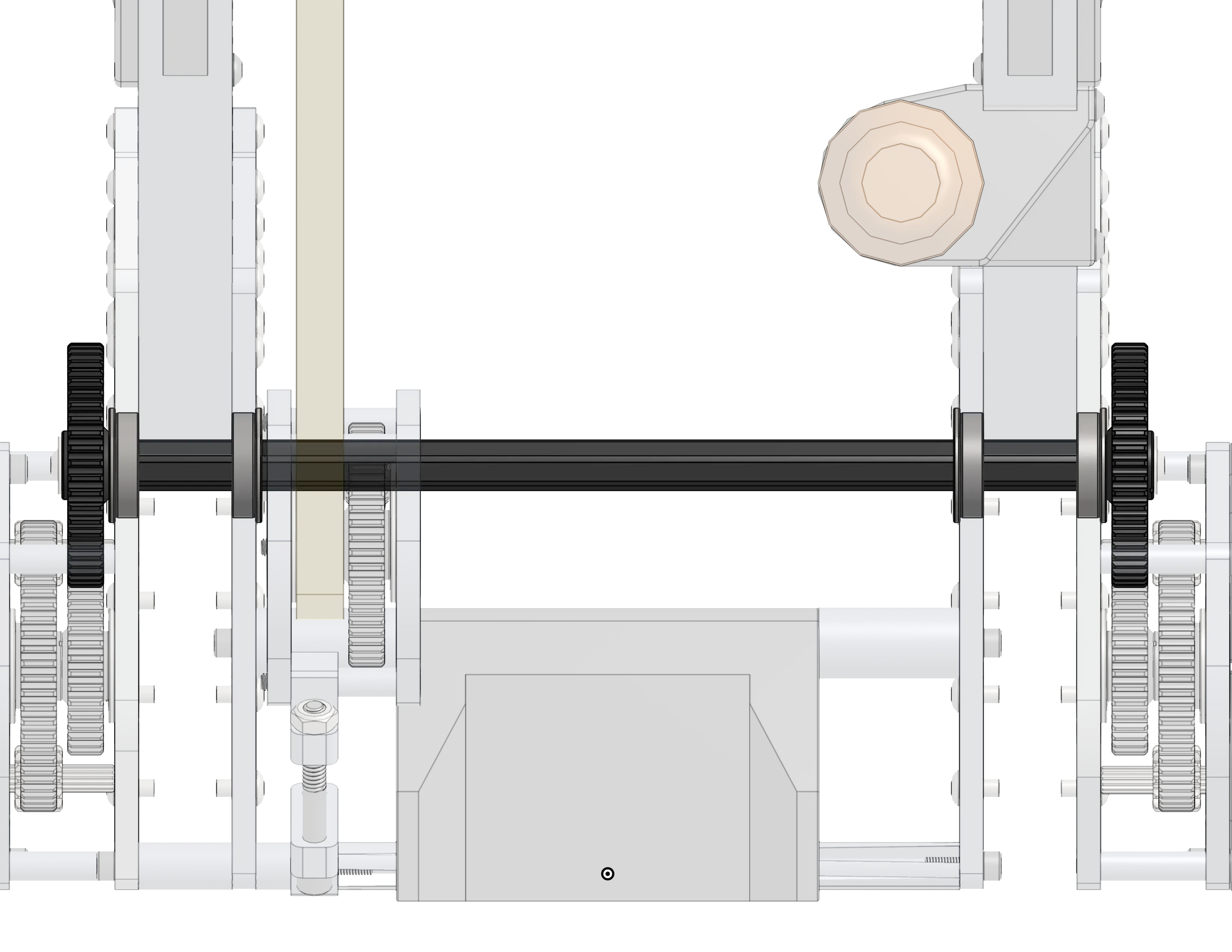
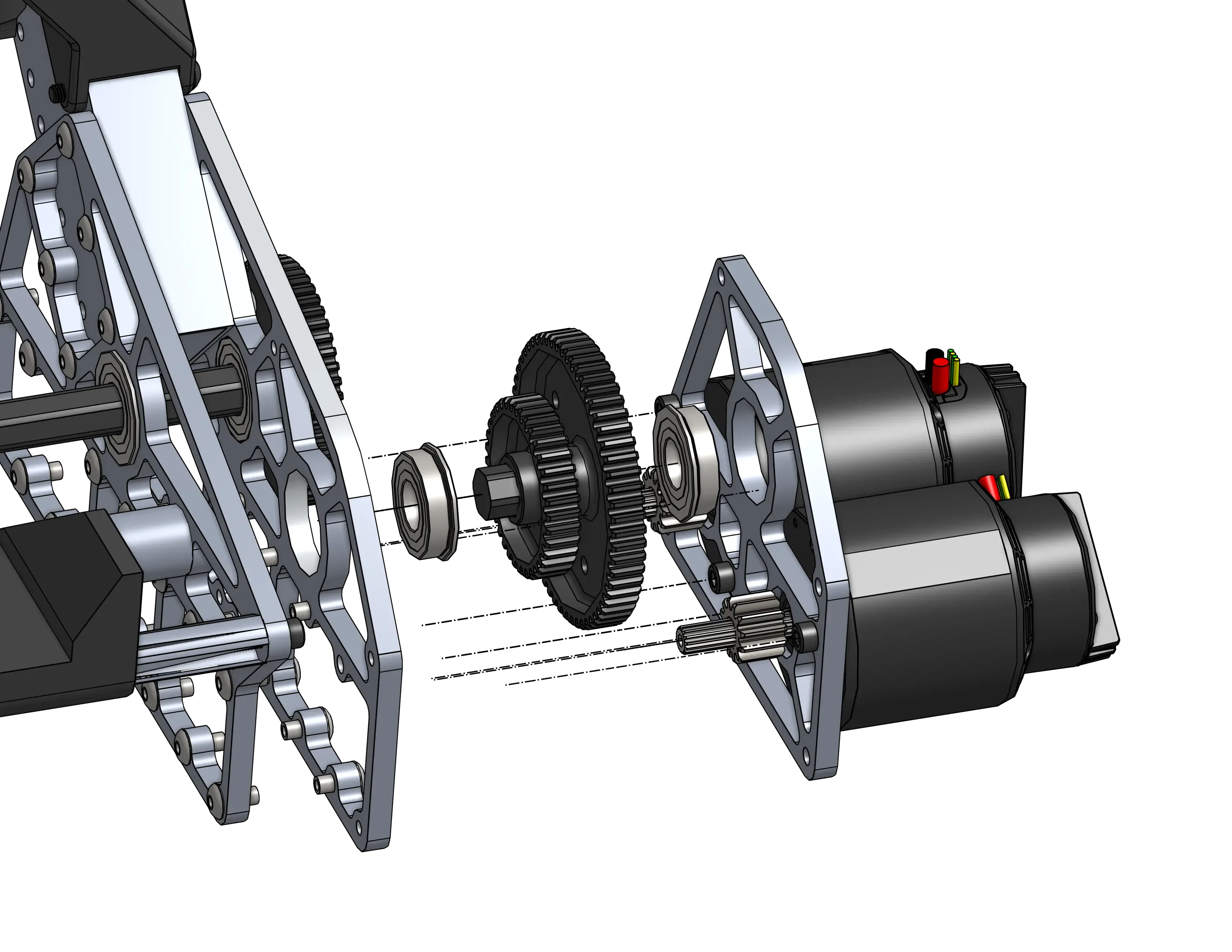
The second stage shaft runs across the robot to link the two gearboxes, which is essential to eliminate any torsion in the arm that would be caused by unevenly driving each side of the pivot independently.
Chain Tensioning
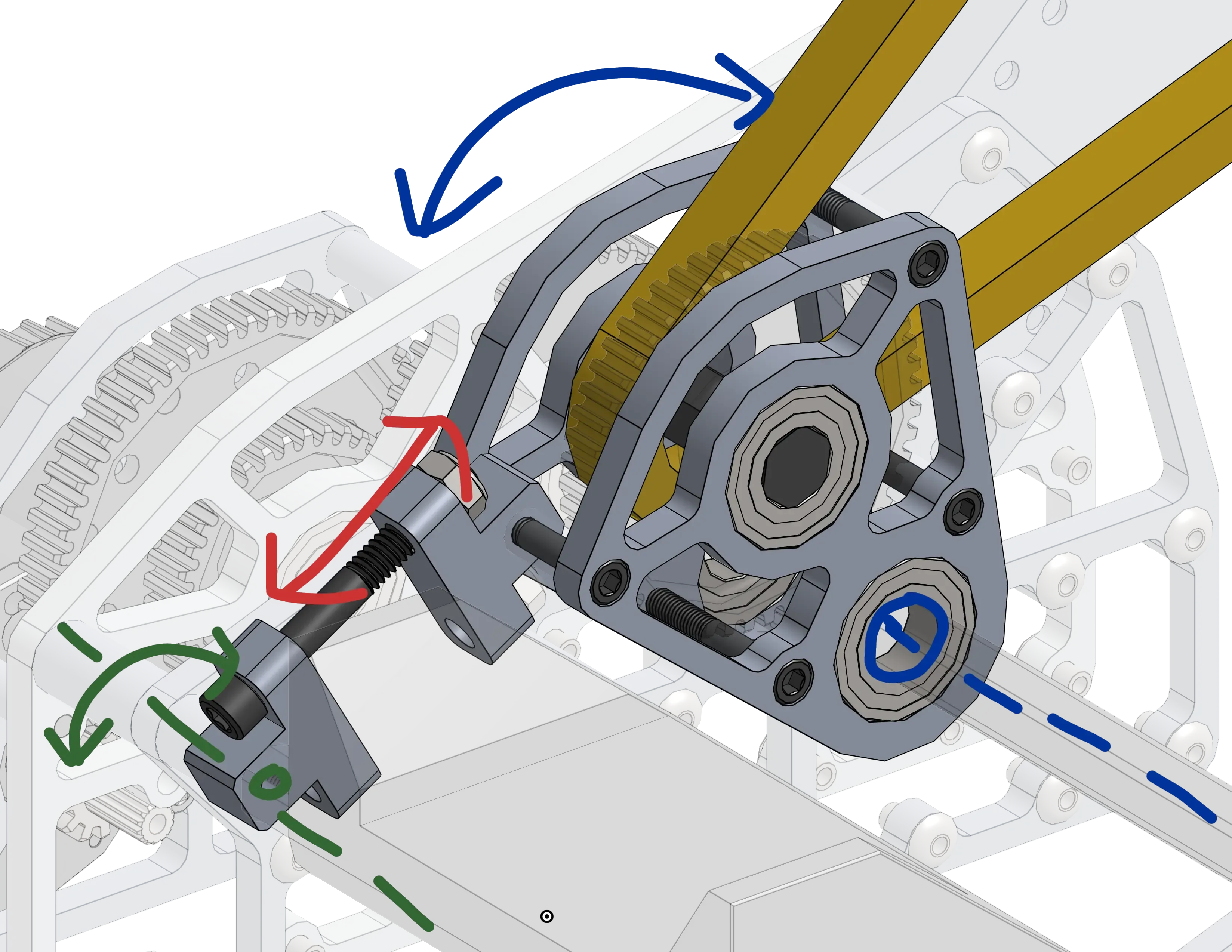
Section titled “Chain Tensioning”The third stage is an additional reduction that doubles as a tensioning mechanism, reusing the mechanical link shaft as an idler shaft to pivot around, adjusting the center to center distance of the final chain run.
Triangular Superstructure
Section titled “Triangular Superstructure”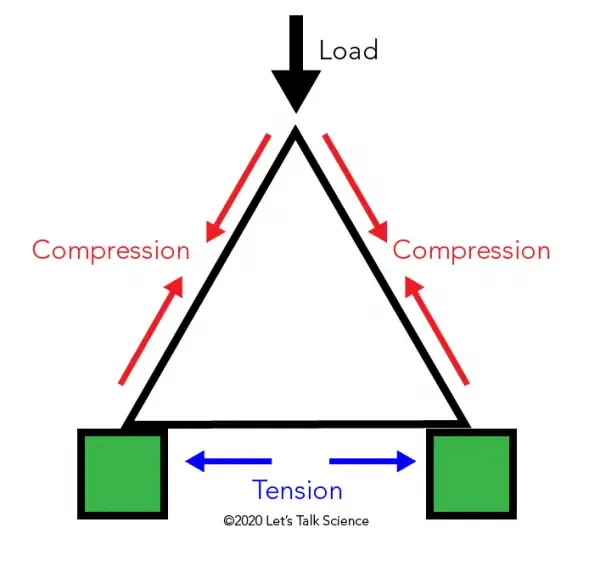
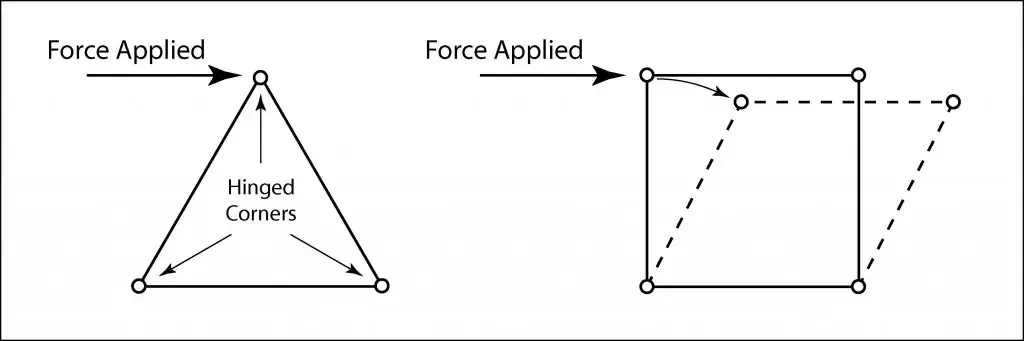
The main pivot itself is a massive dead axle fixed into the triangular superstructure. This dead axle assembly is very simple, with 3 custom parts that are all easily manually machineable on a lathe.